Тренажеры машин специального назначения — различия между версиями
Материал из Кафедра ИТАС ПНИПУ
Kurushin (обсуждение | вклад) |
Kurushin (обсуждение | вклад) |
||
| (не показаны 3 промежуточные версии этого же участника) | |||
| Строка 6: | Строка 6: | ||
| Наименивание проекта || Тренажер машины специального назначения | | Наименивание проекта || Тренажер машины специального назначения | ||
|- | |- | ||
| − | | | + | | Научный руководитель || [[Файзрахманов Рустам Абубакирович|д.э.н., проф. Файзрахманов Р.А.]] |
|- | |- | ||
| − | | Контакты || e-mail: | + | | Контакты || e-mail: itas@pstu.ru |
|- | |- | ||
| || 614013, г. Пермь, ул. Поздеева, д. 7, ПНИПУ, ЭТФ, кафедра ИТАС, к. 227 | | || 614013, г. Пермь, ул. Поздеева, д. 7, ПНИПУ, ЭТФ, кафедра ИТАС, к. 227 | ||
| Строка 16: | Строка 16: | ||
|} | |} | ||
| − | |||
| − | |||
| − | |||
== Общие сведения == | == Общие сведения == | ||
| Строка 28: | Строка 25: | ||
* сеть передачи данных. | * сеть передачи данных. | ||
| − | |||
| − | |||
| − | |||
Задачи, решаемые Системой: | Задачи, решаемые Системой: | ||
| Строка 41: | Строка 35: | ||
# Перевод ТЗМ в походное положение после разряжания; | # Перевод ТЗМ в походное положение после разряжания; | ||
# Погрузка и разгрузка РС. | # Погрузка и разгрузка РС. | ||
| + | |||
| + | [[Файл:Схема ТК ТЗМ.png|Cтруктура тренажерного комплекса|800px|center]] | ||
== Состав программно-аппаратных средств == | == Состав программно-аппаратных средств == | ||
| Строка 62: | Строка 58: | ||
* Радиус действия: до 10 м | * Радиус действия: до 10 м | ||
* Интерфейс сопряжения с микроконтроллером: UART | * Интерфейс сопряжения с микроконтроллером: UART | ||
| − | |||
=== Программное обеспечение === | === Программное обеспечение === | ||
| Строка 77: | Строка 72: | ||
File:Схема_ТК_ТЗМ.png|Схема работы | File:Схема_ТК_ТЗМ.png|Схема работы | ||
</gallery> | </gallery> | ||
| + | |||
| + | {| style="margin-left:auto;margin-right:auto" | ||
| + | |{{#ev:youtube|e6L5M5GEBfo}} | ||
| + | |} | ||
Текущая версия на 13:57, 27 сентября 2016
| Наименивание проекта | Тренажер машины специального назначения |
| Научный руководитель | д.э.н., проф. Файзрахманов Р.А. |
| Контакты | e-mail: itas@pstu.ru |
| 614013, г. Пермь, ул. Поздеева, д. 7, ПНИПУ, ЭТФ, кафедра ИТАС, к. 227 | |
| тел./факс:(342) 39 13 54 | |

Содержание
Общие сведения
Разработанные на кафедре ИТАС тренажерные комплексы машин специального назначения предназначены для решения задач качественной подготовки специалистов, анализа ситуации, управления объектами и процессами в ходе боевой работы машин 9А52-4 и 9Т234-4, выпускаемыми ПАО "Мотовилихинские заводы". Работа выполнялась совместно со специалистами ПАО "МЗ". Тренажеры включают в себя:
- вычислительные узлы для имитации физических процессов, протекающих в машинах специального назначения,
- стационарные пульты управления, заимствованные от машин,
- мобильные пульты, имитирующие работу реальных устройств
- сеть передачи данных.
Задачи, решаемые Системой:
- Подготовка ТЗМ к заряжанию;
- Подготовка РС на ТЗМ перед заряжанием;
- Заряжание;
- Перевод ТЗМ в походное положение после заряжания;
- Подготовка ТЗМ к разряжанию;
- Разряжание;
- Перевод ТЗМ в походное положение после разряжания;
- Погрузка и разгрузка РС.

Состав программно-аппаратных средств
Аппаратное обеспечение
Рабочие места обучаемых (2 шт) и инструктора (1 шт)
- Операционная система: Linux 2.6 Дисплей: 27"
- Разрешение и тип матрицы: 2560 на 1440 пикселей
- Процессор: Intel Core i3 3.2 Ghz 4MB
- Оперативная память: 8GB DDR3 1333MHz
- Жесткий диск: 1TB Serial ATA (7200 rpm)
- Видеокарта: ATI Radeon HD 5670 (512MB GDDR3)
- Размер: 51,7 x 65,0 x 20,7 см
- Сеть: Wi-Fi: AirPort Extreme 802.11n, Bluetooth: 2.1 + EDR
Стационарные пульты машины специального назначения (5 шт):
- Ядро: ARM7
- Напряжение питания: 3,3 В
- Интегрированный контроллер USB
- Максимальная тактовая частота: 72 МГц
- Радиус действия: до 10 м
- Интерфейс сопряжения с микроконтроллером: UART
Программное обеспечение
- Системное программное обеспечение рабочих станций
- Взаимодействие с пользователем
- Анимация персонажа, имитирующего оператора в сиртуальном пространстве тренажера
- Моделирование физических процессов
- Контроль знаний обучаемых

Пульт "З"

Пульт крановщика

Пульты машины 9А52-4
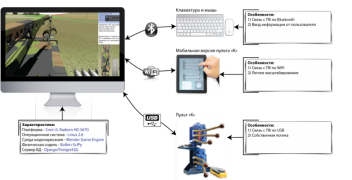
Схема работы


